ServoMount V2 – Een oplossing voor een wisselaandrijving met servomotor
Introductie
Er zijn natuurlijk al vele oplossingen bedacht met servo’s, voor het aandrijven van een wissel op een modelbaan. Waarom dan toch weer een nieuw ontwerp? Dit ontwerp is niet mijn eerste uitvoering van een wisselaandrijving. Maar dat ontwerp, ook een 3D geprinte oplossing, was in de praktijk te bewerkelijk, had te veel onderdelen, te veel scharoeverbindingen en was mechanisch ook niet echt een goede oplossing.
Grootste probleem was echter het afstellen van de micro-schakelaars, welke zorgen voor de juiste polariteit van het hartstuk van het wissel. Dit was echt heel lastig en luisterde heel nauw. Dat was dus de uitdaging die ik mij bij een gereviseerde heb gesteld: reductie van het aantal onderdelen, eenvoudige montage en bovenal geen gedoe met het afstellen van een micro-schakelaar.
De micro-schakelaar
Nu heeft in de regel een wissel slechts één hartstuk, althans een normaal wissel met twee richtingen, rechtdoor en afbuigend. Dus het kwam mij voor dat ik slechts één enkele micro-schakelaar met omschakelkontakt nodig had, om de polariteit van het hartstuk te schakelen.
Dat op zich is mooi, maar hoe krijg je het nu voor elkaar, dat een heen en weer draaiende arm van een servo op het juiste moment de micro-schakelaar bedient?
Nu heb ik bij het maken van de vorige versie van de aandrijving, altijd het standpunt aangenomen dat bij de neutrale of middenstand van de servo, de aandrijfstang voor het wissel loodrecht verticaal wijst. Hierbij dienen dan de wisseltongen eveneens halverwege de stelweg van het wissel te liggen. Deze referentie gebruik ik dan voor de montage het wissel en het boren van het doorvoergat (hierover later meer).
Verder kent een micro-schakelaar een ruststand en een bediende stand. Met de wisseltongen in de middenstand, is het niet van belang welke polariteit hartstuk heeft. Immers de wissel bevind zich dan quasi onderweg van de ene toestand, stel rechtdoor, naar de andere toestand, afbuigend.
Pas als het wissel helemaal is omgelopen, is het van belang dat het hartstuk de juiste polariteit heeft.
M.a.w., slechts bij het bereiken van één eindstand, dient de het hartstuk omgepoold te zijn. Het maakt verder niet uit of dat de afbuigende stand is of de rechtdoorgaande stand. Zolang de wisseltongen nog onderweg zijn naar dat ene, actieve eindpunt, doet de stand van de micro-schakelaar er niet toe. De we kunnen nu een micro-schakelaar zodanig positioneren, dat bij het bereiken van het actieve eindpunt deze omschakelt, door de aandrijfarm van de servo.
In principe hoeven we nu dus nog maar één micro-schakelaar af te stellen. Helaas is dat nog steeds niet makkelijk, zeker als de slag ook nog eens beperkt is. Kunnen we dit nu wellicht nog eenvoudiger maken en kunnen we het afstellen zelfs geheel achterwege laten?
Automatische positionering
Al bij de vorige versie van mijn aandrijving, had ik een methode bedacht om de micro-schakelaar zodanig te monteren, dat deze eenvoudig te stellen was met slechts een enkele schroef. Daarvoor had ik na vele avonden proberen een oplossing bedacht, in de vorm van een houder voor de micro-schakelaar, die gebruikt maakt van een draaibare haak.
Deze haak grijpt om de doorvoer van de servo-as, in het huis van de servo. Ik zal niet teveel in detail treden, maar het werkte zoals ik bedacht had. Deze methode heb ik als uitgangspunt gebruikt voor dit gereviseerde ontwerp. Echter met dien verstande, dat nu deze houder met wat aanpassingen verend is gemonteerd. In de ruststand van de aandrijving, met de wisseltongen halverwege de stelweg, licht de micro-schakelaar net aan op de aandrijfarm van de servo.
Gaat nu de aandrijfarm richting de aangenomen ruststand van het wissel, dan beweegt zich deze van de micro-schakelaar af. In dit geval blijft de micro-schakelaar niet bediend en wordt de polariteit van het hartstuk van het wissel niet gewijzigd.
Omdat de montagehouder van de micro-schakelaar zodanig is, dat hij niet verder om de asdoorvoer kan draaien tot halverwege de slag van de servo, blijft deze dus in deze stand gepositioneerd. De micro-schakelaar kan echter wel de andere richting opdraaien. De montagehouder wordt door een veertje tegen zijn aanslag halverwege gehouden, zodat deze goed gepositioneerd blijft, maar toch beweegbaar is. Het waarom van dat veertje volgt hieronder.
Wanneer we de servo de wissel laten omleggen naar de actieve kant, zal de aandrijfarm van de servo tegen de micro-schakelaar gaan drukken. Omdat deze en de montagehouder nog steeds door het veertje op zijn plaats wordt gehouden, zal de aandrijfarm van de servo nu de micro-schakelaar gaan bedienen. Dit gaat net zolang door, totdat de micro-schakelaar geheel is ingedrukt.
Normaal zou de aandrijfarm nu geblokkeerd worden, maar doordat de montagehouder en micro-schakelaar verend zijn verankerd, zal dit geheel nu door de aandrijfarm tegen de veerkracht in voort worden bewogen. Door deze tegenwerkende veerkracht blijft de micro-schakelaar nog steeds bediend.
Hierdoor zal nu het hartstuk worden omgepoold, zoals de bedoeling was in de actieve stand van het wissel.
Werking aandrijving
Voor de verduidelijking is hieronder een animatie geplaatst, die dit hele proces het omstellen van het wissel in beweging toont. Het toont de beweging van de aandrijving tijdens het omstellen van het wissel. De schematische weergave van het wissel ernaast, laat zien hoe het hartstuk wordt geschakeld.
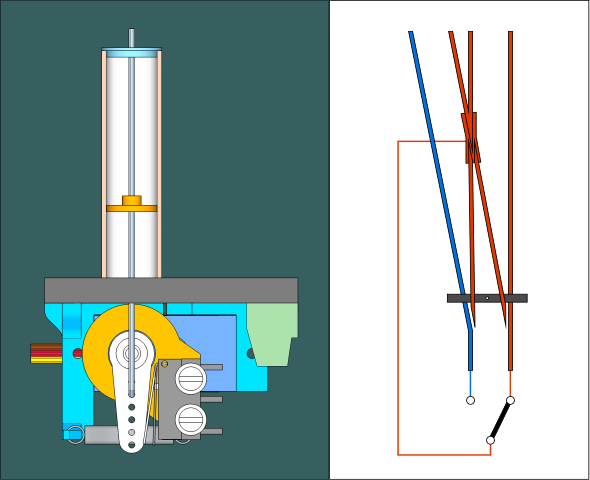
Duidelijk is te zien dat de micro-schakelaar in de in dit geval afbuigende stand van het wissel niet wordt bediend, terwijl deze in de rechtdoorgaande stand wel wordt bediend. ook is goed te zien dat de stelarm kantelt om een in het midden geplaatst draaipunt. Daardoor is de draaihoek in tegenfase met de wisselstand.
Uitvoering
Tenslotte nog een tweetal plaatjes met het aanzicht van de aandrijving, vanaf de bovenzijde en vanaf de onderzijde. In een volgend deel zullen we meer ingaan op de bouw van de aandrijving. Voor de duidelijkheid is slechts de helft van de geleidebuis weergegeven.
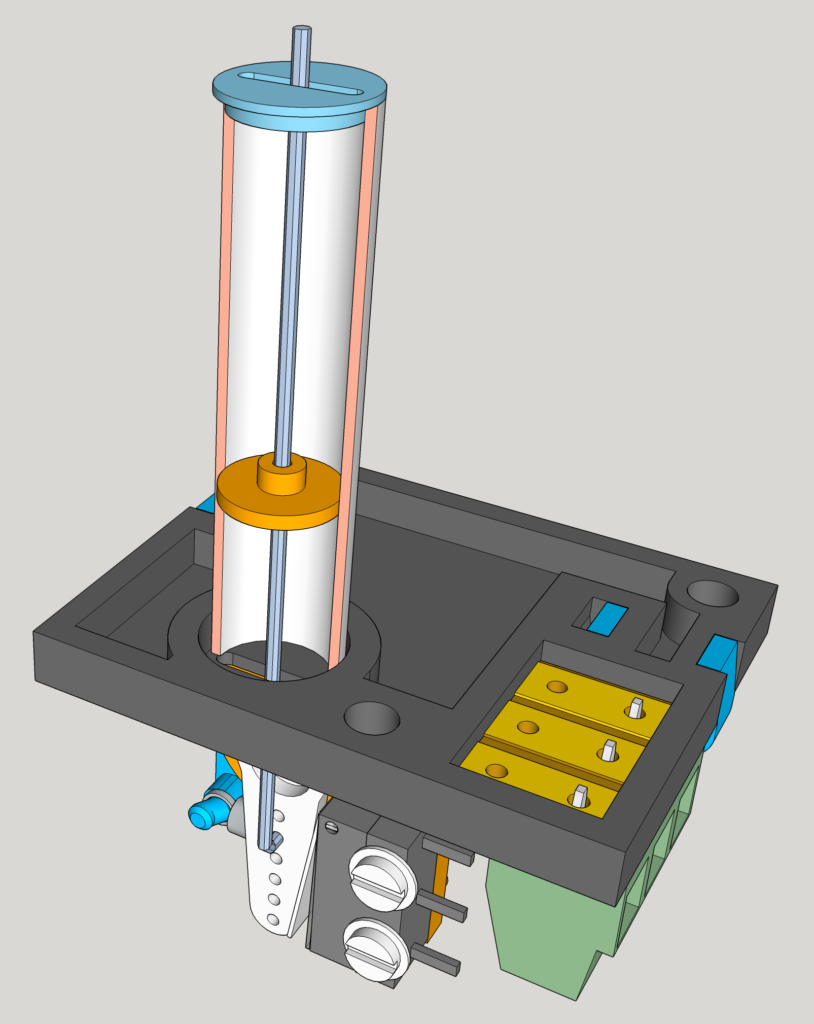
Gezien vanaf de bovenzijde
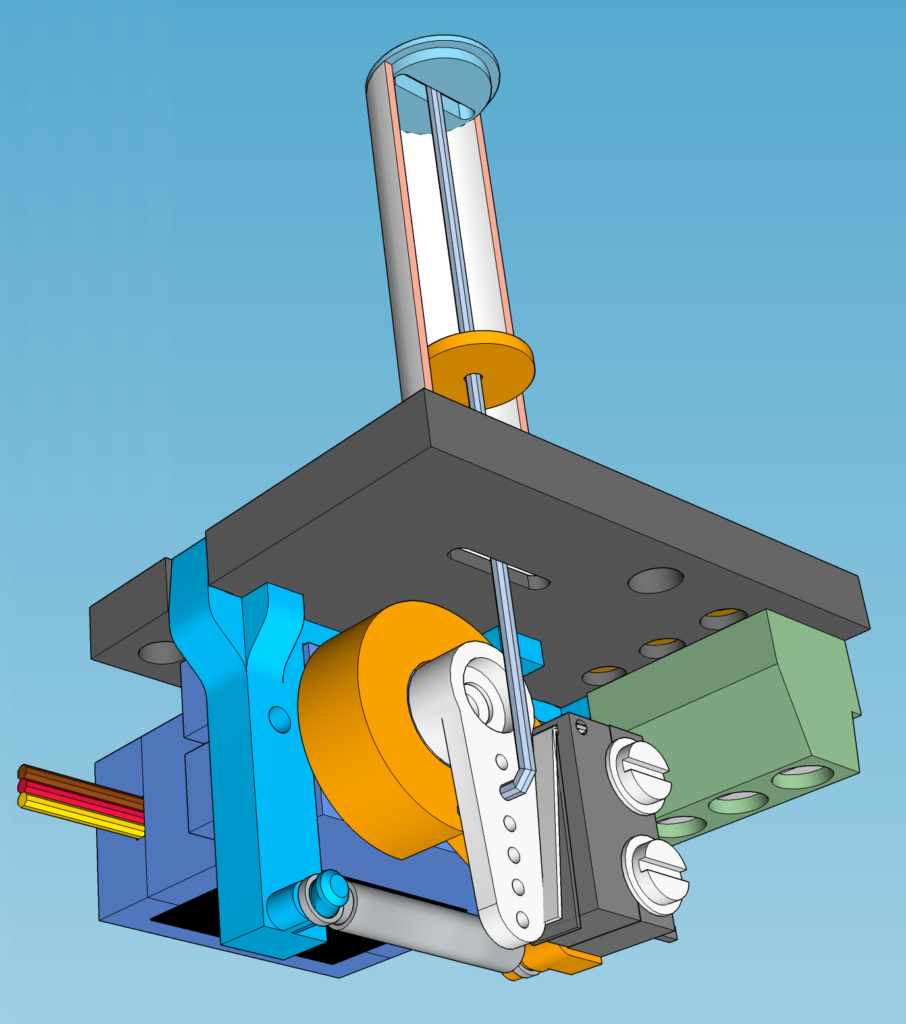
Gezien vanaf de onderzijde